In 2024, SAIR Lab received two significant research grants: a $1.2 million DARPA TIAMAT Grant and a $100K Sony Faculty Innovation Award.
The DARPA TIAMAT Grant will support research in learning and transferring spatial common sense via neural-symbolic learning. The Sony Award will advance high-level spatial navigation abilities on mobile robots.
These funding opportunities will significantly accelerate the lab’s vision of Spatial AI & Robotics. Furthermore, the lab director, Dr. Wang, was elected as an IEEE Senior Member and received the CSE Research Award from the department.
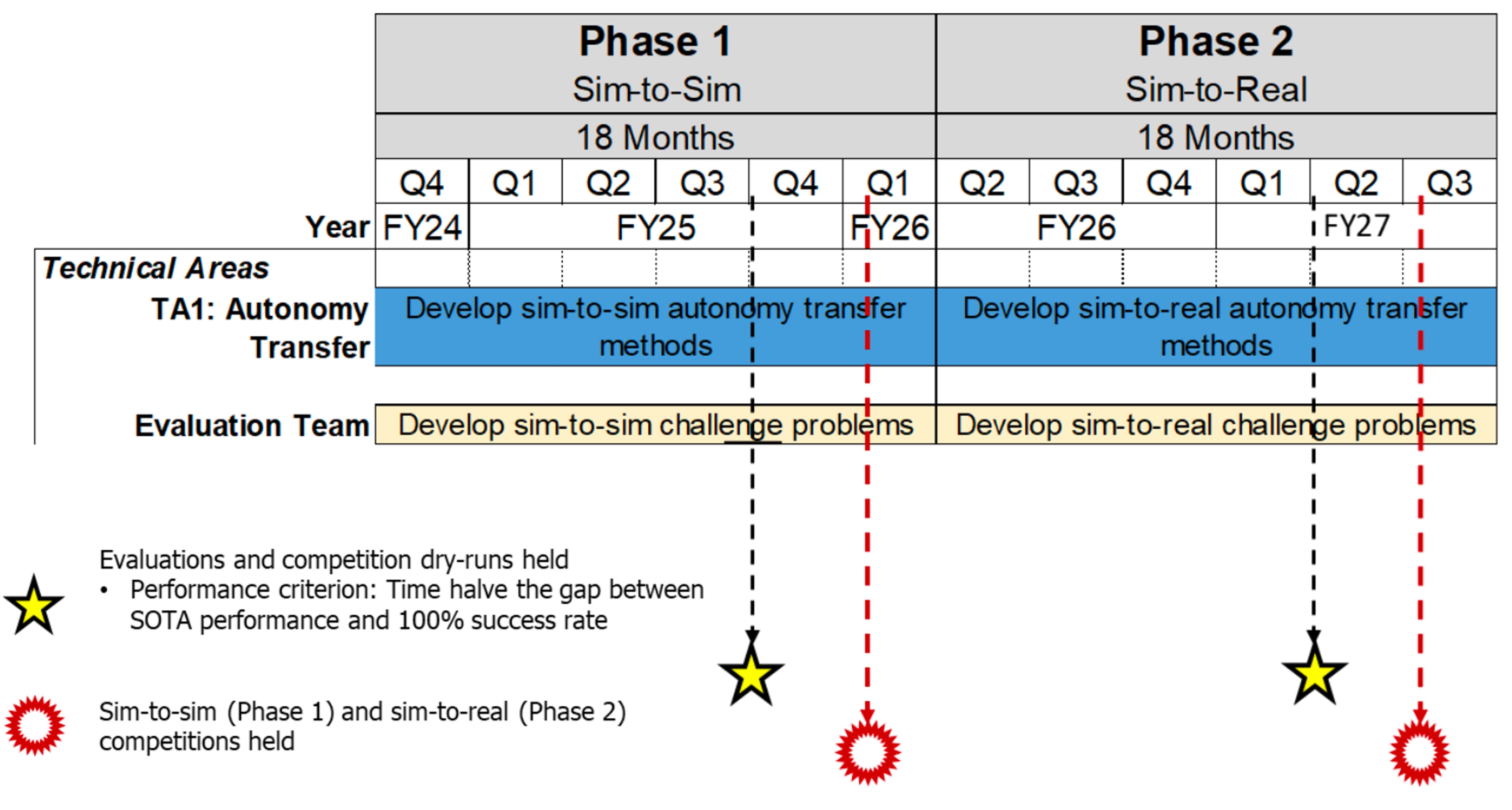
SAIR lab will also be participating in the DARPA TIAMAT challenge, which is organized into two 18-month phases. The Phase 1 will develop sim-to-sim autonomy transfer techniques, while Phase 2 will tackle sim-to-real autonomy transfer methods.
Artificial Intelligence: From Simulation to Reality
Edited by Alvaro Velasquez, Vishal Patel, Antonio Loquercio, and Alan Fern
Wiley-IEEE Press, 2026
Book Chapter
@inbook{ai-ch10-il,
title = {Imperative Learning},
author = {Wang, Chen and Geng, Junyi and Ji, Kaiyi and Fu, Taimeng},
booktitle = {{Artificial Intelligence}: From Simulation to Reality},
publisher = {Wiley-IEEE Press},
editor = {Velasquez, Alvaro and Patel, Vishal and Loquercio, Antonio and Fern, Alan},
year = {2026},
url = {https://www.google.com/books/edition/Artificial_Intelligence/ml7f0AEACAAJ},
cover = {/img/pubs/ai-il-book.jpg}
}
Wang, Chen and Geng, Junyi and Ji, Kaiyi and Fu, Taimeng, "Imperative Learning," Artificial Intelligence: From Simulation to Reality, 2026.
Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy.
Chen Wang, Kaiyi Ji, Junyi Geng, Zhongqiang Ren, Taimeng Fu, Fan Yang, Yifan Guo, Haonan He, Xiangyu Chen, Zitong Zhan, Qiwei Du, Shaoshu Su, Bowen Li, Yuheng Qiu, Yi Du, Qihang Li, Yifan Yang, Xiao Lin, Zhipeng Zhao.
International Journal of Robotics Research (IJRR), 2025.
Unifying robot autonomy via neuro-symbolic learning
@article{wang2025imperative,
title = {Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy},
author = {Wang, Chen and Ji, Kaiyi and Geng, Junyi and Ren, Zhongqiang and Fu, Taimeng and Yang, Fan and Guo, Yifan and He, Haonan and Chen, Xiangyu and Zhan, Zitong and Du, Qiwei and Su, Shaoshu and Li, Bowen and Qiu, Yuheng and Du, Yi and Li, Qihang and Yang, Yifan and Lin, Xiao and Zhao, Zhipeng},
journal = {International Journal of Robotics Research (IJRR)},
year = {2025},
url = {https://arxiv.org/abs/2406.16087},
code = {https://github.com/sair-lab/iSeries},
website = {https://sairlab.org/iseries},
cover = {/img/posts/2024-07-02-iSeries/il-cover.jpg},
addendum = {Unifying robot autonomy via neuro-symbolic learning}
}
Wang, Chen and Ji, Kaiyi and Geng, Junyi and Ren, Zhongqiang and Fu, Taimeng and Yang, Fan and Guo, Yifan and He, Haonan and Chen, Xiangyu and Zhan, Zitong and Du, Qiwei and Su, Shaoshu and Li, Bowen and Qiu, Yuheng and Du, Yi and Li, Qihang and Yang, Yifan and Lin, Xiao and Zhao, Zhipeng, "Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy," International Journal of Robotics Research (IJRR), 2025.
The articles using imperative learning is named as iSeries articles:
iSLAM: Imperative SLAM.
Taimeng Fu, Shaoshu Su, Yiren Lu, Chen Wang.
IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 5, pp. 4607–4614, 2024.
Presented at ICRA 2025First to unify front-end odometry and back-end pose graph via reciprocal learning
@article{fu2024islam,
title = {{iSLAM}: Imperative {SLAM}},
author = {Fu, Taimeng and Su, Shaoshu and Lu, Yiren and Wang, Chen},
journal = {IEEE Robotics and Automation Letters (RA-L)},
year = {2024},
volume = {9},
number = {5},
pages = {4607--4614},
url = {https://arxiv.org/abs/2306.07894},
code = {https://github.com/sair-lab/iSLAM/},
video = {https://youtu.be/rtCvx0XCRno},
website = {https://sairlab.org/iSLAM},
cover = {/img/posts/2023-08-01-iSLAM/iSLAM.mp4},
addinfo = {Presented at ICRA 2025},
addendum = {First to unify front-end odometry and back-end pose graph via reciprocal learning}
}
Fu, Taimeng and Su, Shaoshu and Lu, Yiren and Wang, Chen, "iSLAM: Imperative SLAM," IEEE Robotics and Automation Letters (RA-L), 2024.
European Conference on Computer Vision (ECCV), pp. 183–200, 2024.
A self-supervised feature learning approach pushes SOTA by 30% accuracy gain
@inproceedings{zhan2024imatching,
title = {{iMatching}: Imperative Correspondence Learning},
author = {Zhan, Zitong and Gao, Dasong and Lin, Yun-Jou and Xia, Youjie and Wang, Chen},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2024},
pages = {183--200},
url = {https://arxiv.org/abs/2312.02141},
code = {https://github.com/sair-lab/iMatching},
website = {https://sairlab.org/iMatching},
cover = {/img/posts/2024-07-03-imatching/imatching.gif},
addendum = {A self-supervised feature learning approach pushes SOTA by 30\% accuracy gain}
}
Zhan, Zitong and Gao, Dasong and Lin, Yun-Jou and Xia, Youjie and Wang, Chen, "iMatching: Imperative Correspondence Learning," European Conference on Computer Vision (ECCV), 2024.
iA*: Imperative Learning-based A* Search for Path Planning.
Xiangyu Chen, Fan Yang, Chen Wang.
IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 12, pp. 12987–12994, 2025.
Reducing 66% search area and 54% runtime via imperative learning
@article{chen2025iastar,
title = {{iA*}: Imperative Learning-based A* Search for Path Planning},
author = {Chen, Xiangyu and Yang, Fan and Wang, Chen},
journal = {IEEE Robotics and Automation Letters (RA-L)},
year = {2025},
volume = {10},
number = {12},
pages = {12987-12994},
url = {https://arxiv.org/abs/2403.15870},
code = {https://github.com/sair-lab/iAstar},
website = {https://sairlab.org/iastar/},
cover = {/img/posts/2024-10-28-iAstar/cover.gif},
addendum = {Reducing 66\% search area and 54\% runtime via imperative learning}
}
Chen, Xiangyu and Yang, Fan and Wang, Chen, "iA*: Imperative Learning-based A* Search for Path Planning," IEEE Robotics and Automation Letters (RA-L), 2025.
iMTSP: Solving Min-Max Multiple Traveling Salesman Problem with Imperative Learning.
Yifan Guo, Zhongqiang Ren, Chen Wang.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 10245–10252, 2024.
A pioneer work on imperative learning with discrete optimization
@inproceedings{guo2024imtsp,
title = {{iMTSP}: Solving Min-Max Multiple Traveling Salesman Problem with Imperative Learning},
author = {Guo, Yifan and Ren, Zhongqiang and Wang, Chen},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2024},
pages = {10245--10252},
url = {https://arxiv.org/abs/2405.00285},
code = {https://github.com/sair-lab/iMTSP},
video = {https://youtu.be/h0oflFcvPSc},
website = {https://sairlab.org/iMTSP},
cover = {/img/posts/2024-05-20-iMTSP/iMTSP.mp4},
addendum = {A pioneer work on imperative learning with discrete optimization}
}
Guo, Yifan and Ren, Zhongqiang and Wang, Chen, "iMTSP: Solving Min-Max Multiple Traveling Salesman Problem with Imperative Learning," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
iWalker: Imperative Visual Planning for Walking Humanoid Robot.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2865–2872, 2025.
Best Workshop Paper Award; Enabling humanoid walking via self-supervised footstep planning
@inproceedings{lin2025iwalker,
title = {{iWalker}: Imperative Visual Planning for Walking Humanoid Robot},
author = {Lin, Xiao and Huang, Yuhao and Fu, Taimeng and Xiong, Xiaobin and Wang, Chen},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {2865--2872},
year = {2025},
url = {https://arxiv.org/abs/2409.18361},
video = {https://youtu.be/FPV74PznzTU},
website = {https://sairlab.org/iwalker},
cover = {/img/posts/2024-09-30-iwalker/thumbnail.gif},
addendum = {Best Workshop Paper Award; Enabling humanoid walking via self-supervised footstep planning}
}
Lin, Xiao and Huang, Yuhao and Fu, Taimeng and Xiong, Xiaobin and Wang, Chen, "iWalker: Imperative Visual Planning for Walking Humanoid Robot," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
iKap: Kinematics-aware Planning with Imperative Learning.
IEEE International Conference on Robotics and Automation (ICRA), pp. 10164–10170, 2025.
First imperative learning planner that respects robot kinematics constraints
@inproceedings{li2025ikap,
title = {{iKap}: Kinematics-aware Planning with Imperative Learning},
author = {Li, Qihang and Chen, Zhuoqun and Zheng, Haoze and He, Haonan and Su, Shaoshu and Geng, Junyi and Wang, Chen},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2025},
pages = {10164--10170},
url = {https://arxiv.org/abs/2412.09496},
video = {https://youtu.be/7HPAMFbHc4U},
website = {https://sairlab.org/iKap},
cover = {/img/posts/2024-12-12-ikap/cover.gif},
addendum = {First imperative learning planner that respects robot kinematics constraints}
}
Li, Qihang and Chen, Zhuoqun and Zheng, Haoze and He, Haonan and Su, Shaoshu and Geng, Junyi and Wang, Chen, "iKap: Kinematics-aware Planning with Imperative Learning," IEEE International Conference on Robotics and Automation (ICRA), 2025.
iKap
iMatching
iMTSP
iSLAM
iA*
iWalker
4. SAIR Lab People
In 2024, we are thrilled to welcome a new PhD student and bid farewell to several interns.
Additionally, we had the privilege of witnessing a total solar eclipse in Buffalo on April 8, 2024.
The next total solar eclipse visible in the Buffalo region will occur on October 26, 2144.
5. Theme of 2025
The Theme of SAIR Lab in 2025 will be 👉 Transform 👈.




 Imperative Learning.Artificial Intelligence: From Simulation to RealityEdited by Alvaro Velasquez, Vishal Patel, Antonio Loquercio, and Alan FernWiley-IEEE Press, 2026
Imperative Learning.Artificial Intelligence: From Simulation to RealityEdited by Alvaro Velasquez, Vishal Patel, Antonio Loquercio, and Alan FernWiley-IEEE Press, 2026 Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy.International Journal of Robotics Research (IJRR), 2025.
Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy.International Journal of Robotics Research (IJRR), 2025. iMatching: Imperative Correspondence Learning.European Conference on Computer Vision (ECCV), pp. 183–200, 2024.
iMatching: Imperative Correspondence Learning.European Conference on Computer Vision (ECCV), pp. 183–200, 2024. iA*: Imperative Learning-based A* Search for Path Planning.IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 12, pp. 12987–12994, 2025.
iA*: Imperative Learning-based A* Search for Path Planning.IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 12, pp. 12987–12994, 2025. iWalker: Imperative Visual Planning for Walking Humanoid Robot.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2865–2872, 2025.
iWalker: Imperative Visual Planning for Walking Humanoid Robot.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2865–2872, 2025. iKap: Kinematics-aware Planning with Imperative Learning.IEEE International Conference on Robotics and Automation (ICRA), pp. 10164–10170, 2025.
iKap: Kinematics-aware Planning with Imperative Learning.IEEE International Conference on Robotics and Automation (ICRA), pp. 10164–10170, 2025.