Taimeng Fu is a Ph.D. student at the Department of Computer Science and Engineering (CSE), University at Buffalo (UB). His research interests lie at the intersection of SLAM Systems and Machine Learning. He has received a Presidential Fellowship. He received the SAIR Rising STAR Award 2024, which was the highest honor for junior researchers in SAIR Lab.
Education
- Ph.D., Computer Science, University at Buffalo (UB), USA, Aug. 2023 - Present
- B.S., Computer Science, Chinese University of Hong Kong, Shenzhen, China, Sep. 2019 - June 2023
Experience
- Robotics Institute Summer Scholars, Carnegie Mellon University (CMU), USA, Jun. 2021 - Aug. 2021
Awards
- Presidential Fellowship
- SAIR Rising STAR Award 2024
- IROS 2025 Best Workshop Paper Award
Emails
- Work Email: taimengf@sairlab.org
- Work Email: futaimeng@gmail.com
Publications
-
 Imperative Learning.Artificial Intelligence: From Simulation to RealityEdited by Alvaro Velasquez, Vishal Patel, Antonio Loquercio, and Alan FernWiley-IEEE Press, 2026
Imperative Learning.Artificial Intelligence: From Simulation to RealityEdited by Alvaro Velasquez, Vishal Patel, Antonio Loquercio, and Alan FernWiley-IEEE Press, 2026 -
 Vision-Language Memory for Spatial Reasoning.European Conference on Computer Vision (ECCV), 2026.
Vision-Language Memory for Spatial Reasoning.European Conference on Computer Vision (ECCV), 2026. -
-
Learning When to Jump for Off-road Navigation.Robotics: Science and Systems (RSS), 2026.
-
Fast Task Planning with Neuro-Symbolic Relaxation.IEEE Robotics and Automation Letters (RA-L), vol. 11, no. 3, pp. 3684–3691, 2026.
-
Neuro-Symbolic Learning for Long-Horizon Task Planning Under Complex Logical Constraints.arXiv preprint arXiv:2606.06877, 2026.
-
 iWalker: Imperative Visual Planning for Walking Humanoid Robot.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2865–2872, 2025.
iWalker: Imperative Visual Planning for Walking Humanoid Robot.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2865–2872, 2025. -
 Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy.International Journal of Robotics Research (IJRR), 2025.
Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy.International Journal of Robotics Research (IJRR), 2025. -
-
 PhysORD: A Neuro-Symbolic Approach for Physics-infused Motion Prediction in Off-road Driving.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 11670–11677, 2024.
PhysORD: A Neuro-Symbolic Approach for Physics-infused Motion Prediction in Off-road Driving.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 11670–11677, 2024. -
iSLAM: Imperative SLAM.IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 5, pp. 4607–4614, 2024.
-
 PyPose v0.6: The Imperative Programming Interface for Robotics.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023.
PyPose v0.6: The Imperative Programming Interface for Robotics.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023. -
 PyPose: A Library for Robot Learning with Physics-based Optimization.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 22024–22034, 2023.
PyPose: A Library for Robot Learning with Physics-based Optimization.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 22024–22034, 2023. -
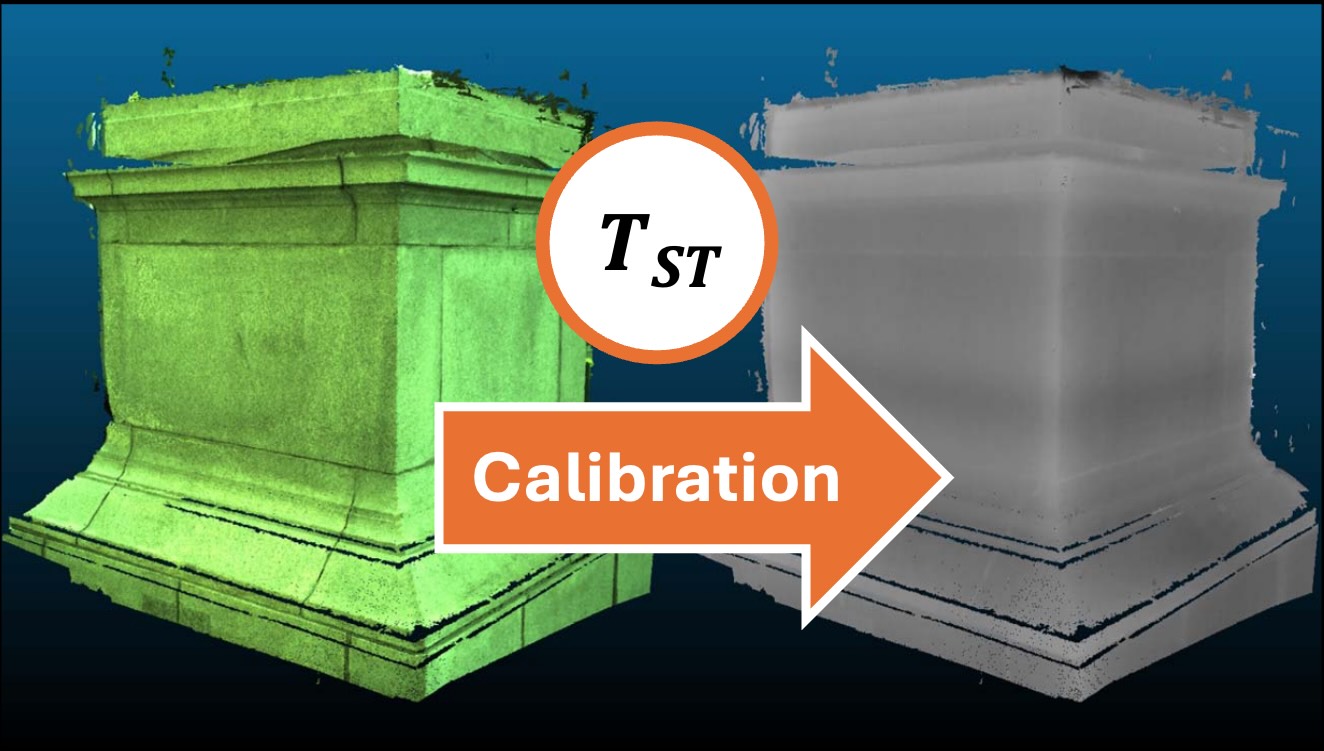 Targetless extrinsic calibration of stereo, thermal, and laser sensors in structured environments.IEEE Transactions on Instrumentation and Measurement, 2022.
Targetless extrinsic calibration of stereo, thermal, and laser sensors in structured environments.IEEE Transactions on Instrumentation and Measurement, 2022.




