Kuan Xu is currently a Postdoc at the School of Electrical and Electronic Engineering (EEE), Nanyang Technological University (NTU). He is a long-term collaborator of the SAIR Lab. His research interests cover Visual SLAM and Vision-Language Navigation.
Experience & Education
- Ph.D. in Engineering, Nanyang Technological University (NTU), Singapore, Apr. 2022 - Aug. 2025
- Master of Engineering, Harbin Institute of Technology, Harbin, China, Sep. 2016 - June 2018
- Bachelor of Engineering, Harbin Institute of Technology, Harbin, China, Sep. 2012 - June 2016
Emails
- Work Email: kuan.xu@ntu.edu.sg
- School Email: kuan.xu@ntu.edu.sg
Publications
-
A Deployable Embodied Vision-Language Navigation System with Hierarchical Cognition and Context-Aware Exploration.arXiv preprint arXiv:2604.21363, 2026.
-
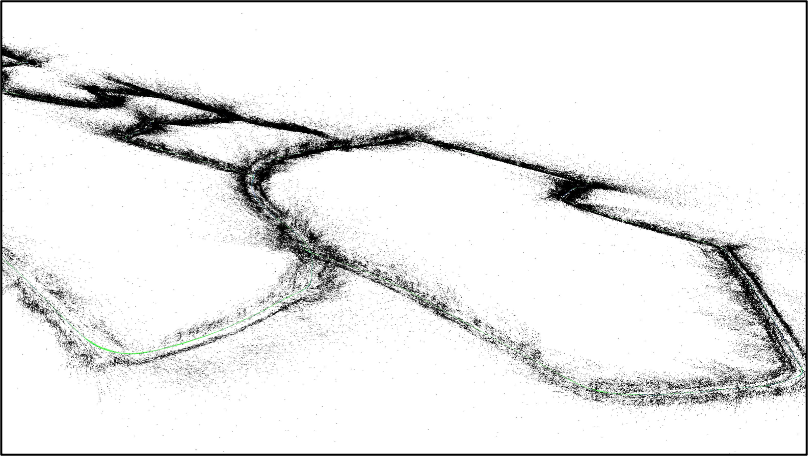 LST-SLAM: A Stereo Thermal SLAM System for Kilometer-Scale Dynamic Environments.IEEE International Conference on Robotics and Automation (ICRA), 2026.
LST-SLAM: A Stereo Thermal SLAM System for Kilometer-Scale Dynamic Environments.IEEE International Conference on Robotics and Automation (ICRA), 2026. -
 Enhancing Scene Coordinate Regression with Efficient Keypoint Detection and Sequential Information.IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 10, pp. 9932–9939, 2025.
Enhancing Scene Coordinate Regression with Efficient Keypoint Detection and Sequential Information.IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 10, pp. 9932–9939, 2025. -
 GroundSLAM: A Robust Visual SLAM System for Warehouse Robots Using Ground Textures.arXiv preprint arXiv:1710.05502, 2025.
GroundSLAM: A Robust Visual SLAM System for Warehouse Robots Using Ground Textures.arXiv preprint arXiv:1710.05502, 2025. -
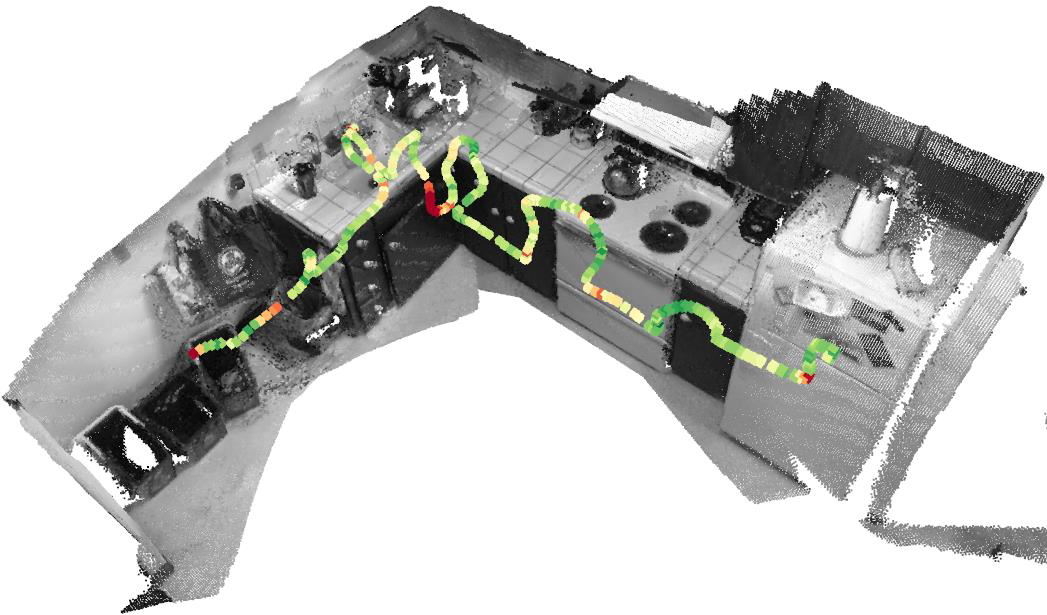
AirSLAM: An Efficient and Illumination-Robust Point-Line Visual SLAM System.IEEE Transactions on Robotics (T-RO), vol. 41, pp. 1673–1692, 2025.
-
 A Fast and Light-weight Noniterative Visual Odometry with RGB-D Cameras.Unmanned Systems, vol. 13, no. 03, pp. 957–969, 2025.
A Fast and Light-weight Noniterative Visual Odometry with RGB-D Cameras.Unmanned Systems, vol. 13, no. 03, pp. 957–969, 2025. -
 AirSwarm: Enabling Cost-Effective Multi-UAV Research with COTS Drones.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 21487–21494, 2025.
AirSwarm: Enabling Cost-Effective Multi-UAV Research with COTS Drones.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 21487–21494, 2025. -
 PyPose: A Library for Robot Learning with Physics-based Optimization.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 22024–22034, 2023.
PyPose: A Library for Robot Learning with Physics-based Optimization.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 22024–22034, 2023. -
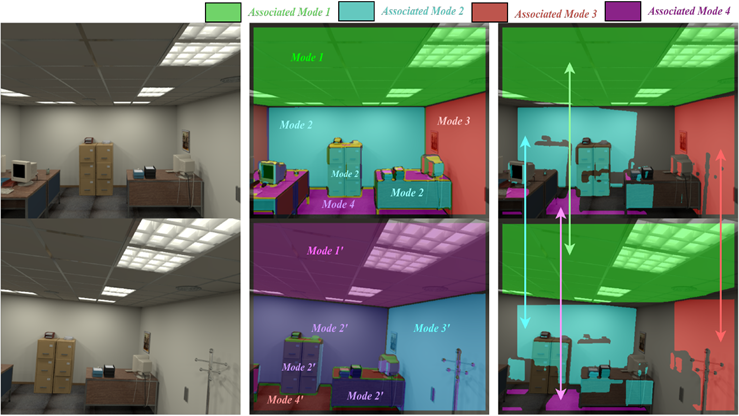
 AirVO: An Illumination-Robust Point-Line Visual Odometry.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3429–3436, 2023.
AirVO: An Illumination-Robust Point-Line Visual Odometry.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3429–3436, 2023. -
 PyPose v0.6: The Imperative Programming Interface for Robotics.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023.
PyPose v0.6: The Imperative Programming Interface for Robotics.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023. -
 AirObject: A Temporally Evolving Graph Embedding for Object Identification.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 8407–8416, 2022.
AirObject: A Temporally Evolving Graph Embedding for Object Identification.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 8407–8416, 2022. -
AirCode: A Robust Object Encoding Method.IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 2, pp. 1816–1823, 2022.