Paper titled “Non-iterative SLAM” received the best paper award in robotic planning from the International Conference on Advanced Robotics. In this work, we propose an efficient RGB-D-inertial dense mapping method with a closed-form solution.
Real-time dense mapping on a laptop.
Existing SLAM methods often require iterative solutions to find data association.
For example, they require gradient descent algorithm to perform bundle adjustment, require RANSAC and ICP to match two point clouds.
However, all of them are computational expensive or sensitive to initialization.
To solve this problem, we develop Non-iterative SLAM, which has a non-iterative solution.
It is the first RGB-D-Inertial SLAM method that has a closed-from solution only with a complexity of O(N log N).
Because of this, it is very computationally efficient. We can even perform real-time dense mapping on a credit card sized computing board.
Live demo on a credit card sized computing board. No post-processing required.
To the best of our knowledge, it was the world’s first real-time dense mapping demo on such a small computer.
It can provide centimeter level accuracy with an onboard low power processor on a flying robot.
Real-time trajectory estimation on a flying robot.
The closed-form solution is based on our kernel cross-correlator (KCC), which is published in AAAI 2017.
KCC is robust to noises, thus the trajectory estimation is also smoother than other methods.
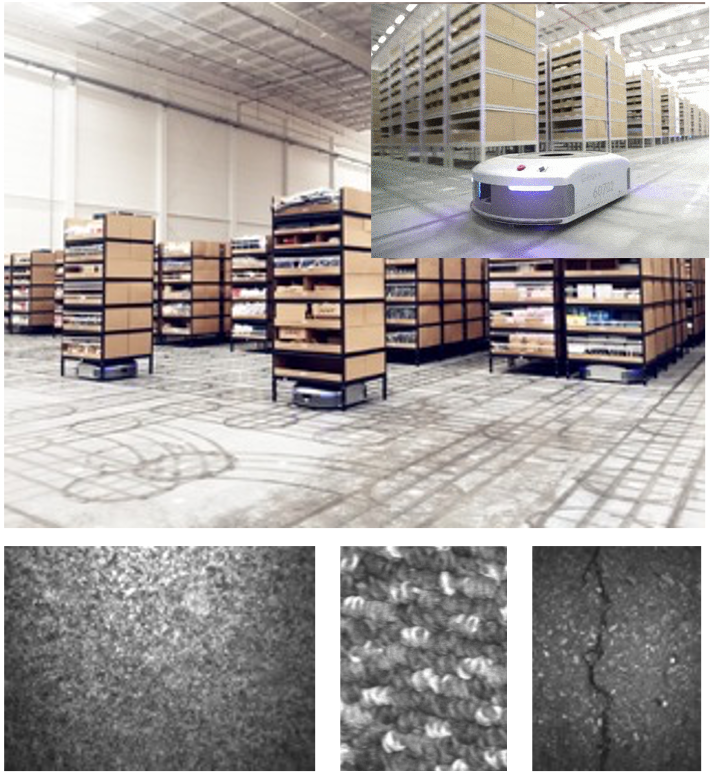
Robot Localization only with Ground Textures.
The QR code is for calculating the drift error instead of localization.
We also applied it to warehouse robots for high-precision localization only with ground textures.
In the tests, it only produces 0.1% to 0.5% drift error if no loop closure is given.
Theoretically, the closed-form solution is based on our paper titled “Kernel Cross-Correlator”, which has a closed-form solution in frequency domain. For more detailed information, please refer to our papers.
Video
Publications
Non-iterative SLAM.
Chen Wang, Junsong Yuan, Lihua Xie.
International Conference on Advanced Robotics, pp. 83–90, 2017.
Best paper award in robotic planning
@inproceedings{wang2017non,
title = {Non-iterative SLAM},
author = {Wang, Chen and Yuan, Junsong and Xie, Lihua},
booktitle = {International Conference on Advanced Robotics},
pages = {83--90},
year = {2017},
organization = {IEEE},
url = {https://arxiv.org/abs/1701.05294},
video = {https://youtu.be/Ed_6wYIKRfs},
code = {https://github.com/sair-lab/ni-slam},
website = {https://sairlab.org/ni-slam/},
cover = {/img/posts/2020-04-20-ni-slam/ni-slam.mp4},
addendum = {Best paper award in robotic planning}
}
Wang, Chen and Yuan, Junsong and Xie, Lihua, "Non-iterative SLAM," International Conference on Advanced Robotics, 2017.
Kernel Cross-Correlator.
Chen Wang, Le Zhang, Lihua Xie, Junsong Yuan.
Thirty-Second AAAI Conference on Artificial Intelligence (AAAI), pp. 4179–4186, 2018.
The first theorem unifying correlation filters
@inproceedings{wang2018kernel,
title = {Kernel Cross-Correlator},
author = {Wang, Chen and Zhang, Le and Xie, Lihua and Yuan, Junsong},
booktitle = {Thirty-Second AAAI Conference on Artificial Intelligence (AAAI)},
pages = {4179--4186},
year = {2018},
url = {https://arxiv.org/abs/1709.05936},
code = {https://github.com/sair-lab/KCC},
cover = {/img/pubs/KernelCrossCorrelator.JPEG},
addendum = {The first theorem unifying correlation filters}
}
Wang, Chen and Zhang, Le and Xie, Lihua and Yuan, Junsong, "Kernel Cross-Correlator," Thirty-Second AAAI Conference on Artificial Intelligence (AAAI), 2018.
GroundSLAM: A Robust Visual SLAM System for Warehouse Robots Using Ground Textures.
Kuan Xu, Zheng Yang, Lihua Xie, Chen Wang.
arXiv preprint arXiv:1710.05502, 2025.
Deployment-ready localization system with superior robustness
@article{xu2025groundslam,
title = {GroundSLAM: A Robust Visual SLAM System for Warehouse Robots Using Ground Textures},
author = {Xu, Kuan and Yang, Zheng and Xie, Lihua and Wang, Chen},
journal = {arXiv preprint arXiv:1710.05502},
year = {2025},
url = {https://arxiv.org/abs/1710.05502},
video = {https://youtu.be/PjpNHrHARsI},
code = {https://github.com/sair-lab/GroundSLAM},
website = {https://sairlab.org/groundslam/},
cover = {/img/posts/2025-04-12-groundslam/cover_image.gif},
addendum = {Deployment-ready localization system with superior robustness}
}
Xu, Kuan and Yang, Zheng and Xie, Lihua and Wang, Chen, "GroundSLAM: A Robust Visual SLAM System for Warehouse Robots Using Ground Textures," arXiv preprint arXiv:1710.05502, 2025.


 Kernel Cross-Correlator.Thirty-Second AAAI Conference on Artificial Intelligence (AAAI), pp. 4179–4186, 2018.
Kernel Cross-Correlator.Thirty-Second AAAI Conference on Artificial Intelligence (AAAI), pp. 4179–4186, 2018. GroundSLAM: A Robust Visual SLAM System for Warehouse Robots Using Ground Textures.arXiv preprint arXiv:1710.05502, 2025.
GroundSLAM: A Robust Visual SLAM System for Warehouse Robots Using Ground Textures.arXiv preprint arXiv:1710.05502, 2025.