To close out the year 2023, we list the most important achievements of the SAIR Lab. We thank all the team members and people who have ever supported us!
The Theme of SAIR Lab in 2023 is 👉 Growth 👈.
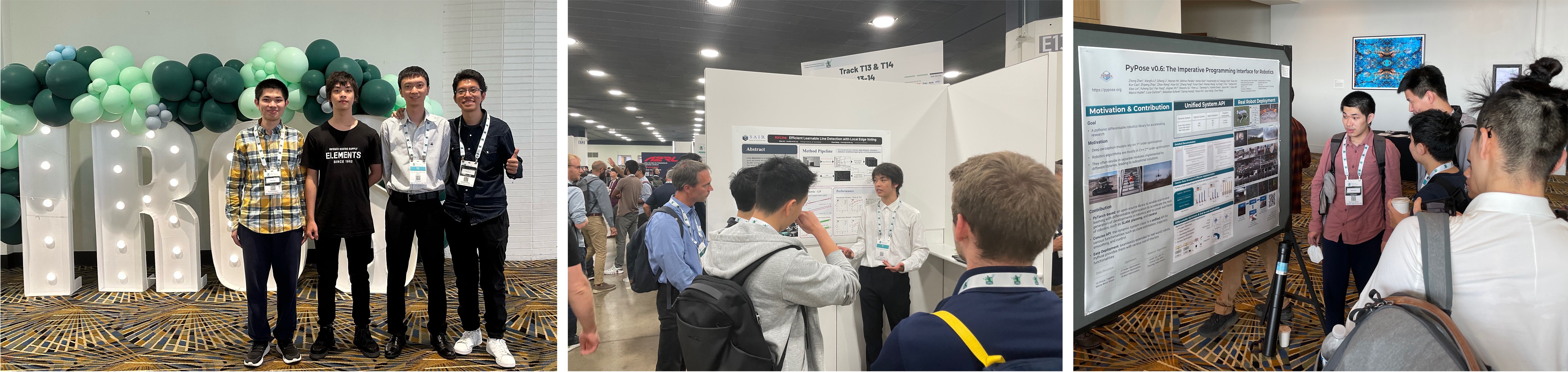
1. IROS’23
Four SAIR Lab members participated in the IROS’23 in Detroit, presenting their research.
2. ICCV’23 Workshop
We successfully organized the ICCV’23 Workshop on Robot Learning and SLAM in Paris, France. The number of participants surpasses the meeting room’s capacity! The online views reached 3K in three days on YouTube.
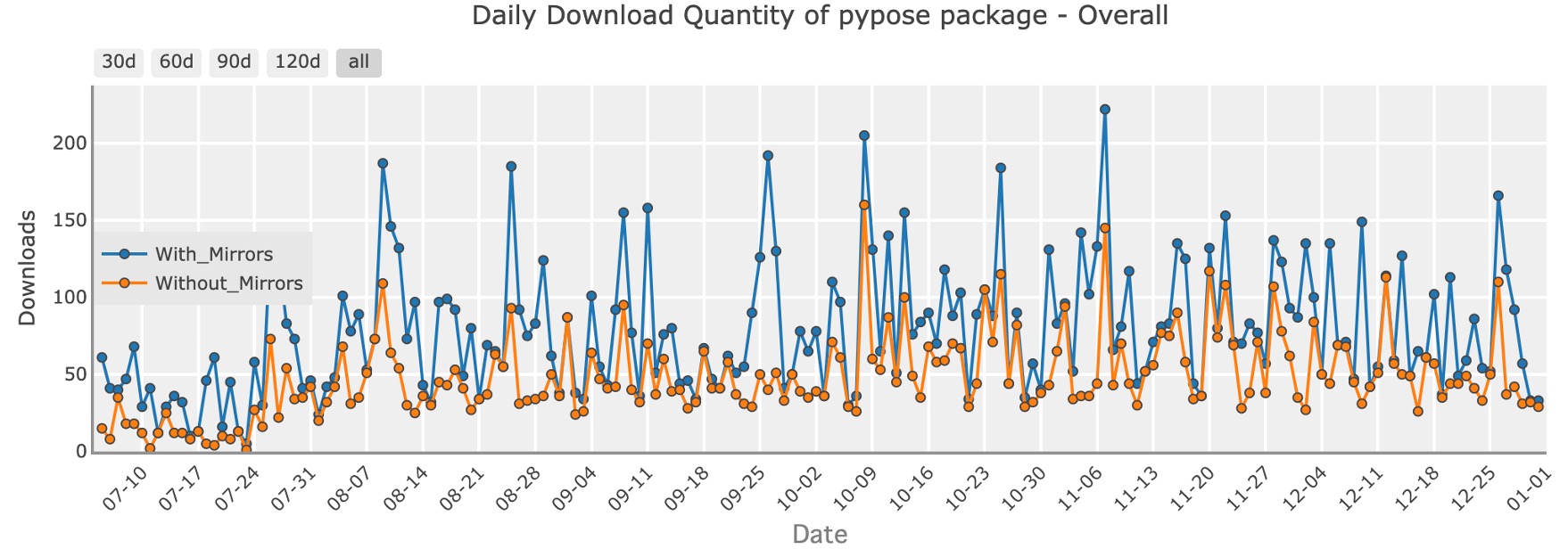
3. PyPose library for robot learning
The PyPose library was finally officially published in CVPR 2023 and IROS 2023, with 17 new versions released. It also rapidly reached 1.5K monthly downloads via PyPI. The developer community has also steadily increased by 20%.
4. Highlighted Research
4.1. iSLAM: Imperative SLAM
A novel self-supervised learning framework for SLAM that, for the first time, integrates data-driven front-end and geometry-based back-end and realizes their reciprocal correction.
A new self-supervised learning scheme for feature correspondence, capable of functioning on arbitrary uninterrupted videos without camera pose or depth labels; Achieved an average of 30% accuracy gain over current state-of-the-art models.
4.3. AirVO: An Illumination-Robust Point-Line Visual Odometry
Robust visual odometry system, optimized for real-time performance on low-power devices; Demonstrated improved accuracy and robustness in various lighting conditions.
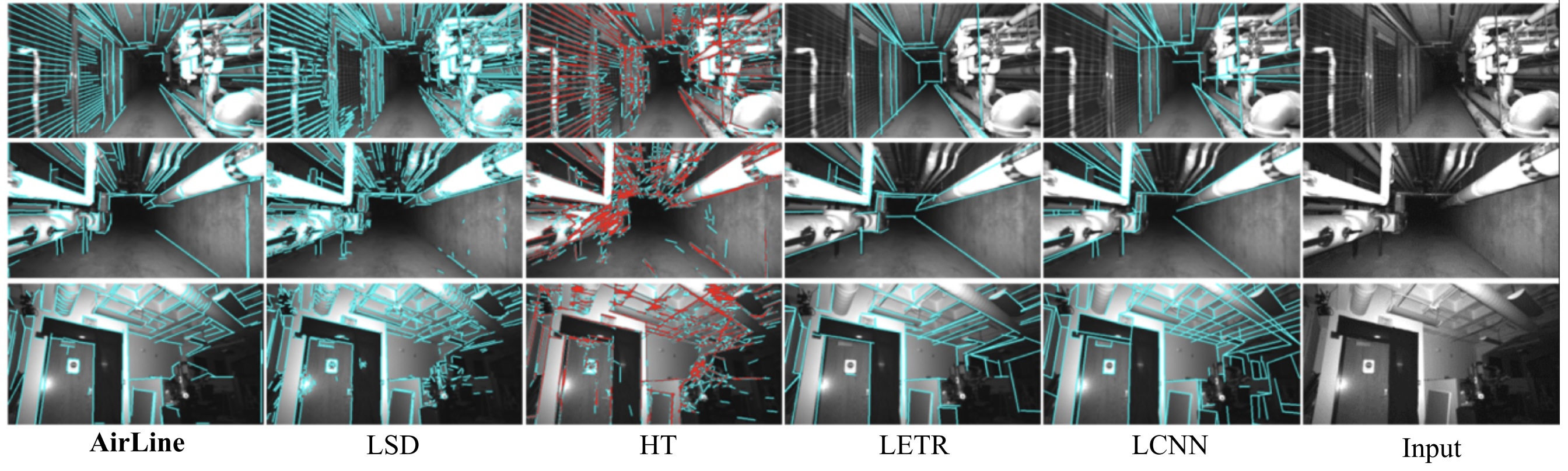
4.4. AirLine: Efficient Learnable Line Detection with Local Edge Voting
A novel learnable edge-based line detection algorithm for robotic tasks. Offered improved generalization in unseen environments and significantly faster runtime, while maintaining high precision.
iSLAM: Imperative SLAM.
Taimeng Fu, Shaoshu Su, Yiren Lu, Chen Wang.
IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 5, pp. 4607–4614, 2024.
Presented at ICRA 2025First to unify front-end odometry and back-end pose graph via reciprocal learning
@article{fu2024islam,
title = {{iSLAM}: Imperative {SLAM}},
author = {Fu, Taimeng and Su, Shaoshu and Lu, Yiren and Wang, Chen},
journal = {IEEE Robotics and Automation Letters (RA-L)},
year = {2024},
volume = {9},
number = {5},
pages = {4607--4614},
url = {https://arxiv.org/abs/2306.07894},
code = {https://github.com/sair-lab/iSLAM/},
video = {https://youtu.be/rtCvx0XCRno},
website = {https://sairlab.org/iSLAM},
cover = {/img/posts/2023-08-01-iSLAM/iSLAM.mp4},
addinfo = {Presented at ICRA 2025},
addendum = {First to unify front-end odometry and back-end pose graph via reciprocal learning}
}
Fu, Taimeng and Su, Shaoshu and Lu, Yiren and Wang, Chen, "iSLAM: Imperative SLAM," IEEE Robotics and Automation Letters (RA-L), 2024.
European Conference on Computer Vision (ECCV), pp. 183–200, 2024.
A self-supervised feature learning approach pushes SOTA by 30% accuracy gain
@inproceedings{zhan2024imatching,
title = {{iMatching}: Imperative Correspondence Learning},
author = {Zhan, Zitong and Gao, Dasong and Lin, Yun-Jou and Xia, Youjie and Wang, Chen},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2024},
pages = {183--200},
url = {https://arxiv.org/abs/2312.02141},
code = {https://github.com/sair-lab/iMatching},
website = {https://sairlab.org/iMatching},
cover = {/img/posts/2024-07-03-imatching/imatching.gif},
addendum = {A self-supervised feature learning approach pushes SOTA by 30\% accuracy gain}
}
Zhan, Zitong and Gao, Dasong and Lin, Yun-Jou and Xia, Youjie and Wang, Chen, "iMatching: Imperative Correspondence Learning," European Conference on Computer Vision (ECCV), 2024.
AirVO: An Illumination-Robust Point-Line Visual Odometry.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3429–3436, 2023.
@inproceedings{xu2023airvo,
title = {{AirVO}: An Illumination-Robust Point-Line Visual Odometry},
author = {Xu, Kuan and Hao, Yuefan and Yuan, Shenghai and Wang, Chen and Xie, Lihua},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2023},
pages = {3429--3436},
url = {https://arxiv.org/abs/2212.07595},
code = {https://github.com/sair-lab/AirVO},
video = {https://youtu.be/YfOCLll_PfU},
website = {https://sairlab.org/airvo/},
cover = {/img/posts/2022-10-14-airvo/demo_uma.gif}
}
Xu, Kuan and Hao, Yuefan and Yuan, Shenghai and Wang, Chen and Xie, Lihua, "AirVO: An Illumination-Robust Point-Line Visual Odometry," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
AirLine: Efficient Learnable Line Detection with Local Edge Voting.
Xiao Lin, Chen Wang.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3270–3277, 2023.
@inproceedings{lin2023airline,
title = {{AirLine}: Efficient Learnable Line Detection with Local Edge Voting},
author = {Lin, Xiao and Wang, Chen},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2023},
pages = {3270--3277},
url = {https://arxiv.org/abs/2303.16500},
video = {https://youtu.be/EKDx3Z9qYUQ},
code = {https://github.com/sair-lab/AirLine},
website = {https://sairlab.org/airline/},
cover = {/img/posts/2023-03-31-airline/pipeline.gif}
}
Lin, Xiao and Wang, Chen, "AirLine: Efficient Learnable Line Detection with Local Edge Voting," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
5. SAIR Lab Team
Established in 2022, the SAIR Lab experienced significant growth in the year 2023. Until the end of 2023, we have 5 PhD students and several visiting scholars and Master’s students. One student graduated from the SAIR Lab.


 iMatching: Imperative Correspondence Learning.European Conference on Computer Vision (ECCV), pp. 183–200, 2024.
iMatching: Imperative Correspondence Learning.European Conference on Computer Vision (ECCV), pp. 183–200, 2024. AirVO: An Illumination-Robust Point-Line Visual Odometry.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3429–3436, 2023.
AirVO: An Illumination-Robust Point-Line Visual Odometry.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3429–3436, 2023. AirLine: Efficient Learnable Line Detection with Local Edge Voting.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3270–3277, 2023.
AirLine: Efficient Learnable Line Detection with Local Edge Voting.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3270–3277, 2023.