Shaoshu Su is a Ph.D. student at the Department of Computer Science and Engineering (CSE), University at Buffalo (UB). His research interests include Learning-based Visual Odometry, Reinforcement Learning, as well as Planning and Control problems in Robotics 🤖.
Experience
- Research Scientist
- University at Buffalo (UB), USA
- Nov. 2022 - Sept. 2023
- Visiting Student
- University of California, Berkeley, USA
- Mar. 2022 - Nov. 2022
- Research Assistant
- University of California, Riverside, USA
- 2020 - 2022
Education
- Ph.D. in Computer Science
- University at Buffalo (UB), USA
- Aug. 2023 - Present
- Master of Science in Electrical Engineering
- University of California, Riverside, USA
- Sep. 2019 - Mar. 2022
- Bachelor of Science in Aerospace Engineering
- Beijing Institute of Technology, Beijing, China
- Sep. 2015 - June 2019
Emails
- Work Email: shaoshus@sairlab.org
- School Email: shaoshus@buffalo.edu
Publications
-
Learning When to Jump for Off-road Navigation.Robotics: Science and Systems (RSS), 2026.
-
Fast Task Planning with Neuro-Symbolic Relaxation.IEEE Robotics and Automation Letters (RA-L), vol. 11, no. 3, pp. 3684–3691, 2026.
-
-
 Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy.International Journal of Robotics Research (IJRR), 2025.
Imperative Learning: A Self-supervised Neuro-Symbolic Learning Framework for Robot Autonomy.International Journal of Robotics Research (IJRR), 2025. -
SuperPC: A Single Diffusion Model for Point Cloud Completion, Upsampling, Denoising, and Colorization.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 16953–16964, 2025.
-
 iKap: Kinematics-aware Planning with Imperative Learning.IEEE International Conference on Robotics and Automation (ICRA), pp. 10164–10170, 2025.
iKap: Kinematics-aware Planning with Imperative Learning.IEEE International Conference on Robotics and Automation (ICRA), pp. 10164–10170, 2025. -
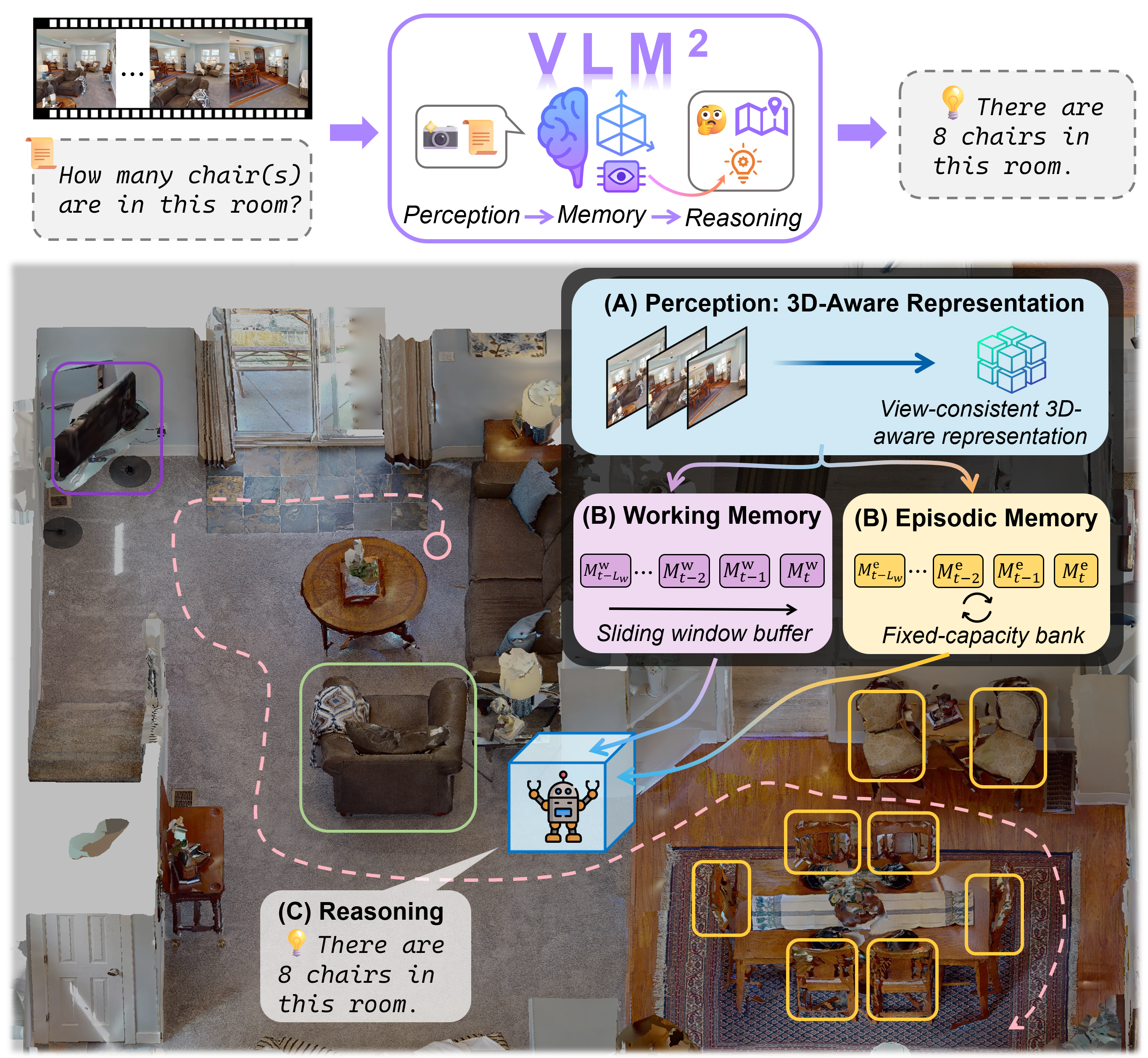 Vision-Language Memory for Spatial Reasoning.arXiv preprint arXiv:2511.20644, 2025.
Vision-Language Memory for Spatial Reasoning.arXiv preprint arXiv:2511.20644, 2025. -
-
iSLAM: Imperative SLAM.IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 5, pp. 4607–4614, 2024.
-
 SubT-MRS Dataset: Pushing SLAM Towards All-weather Environments.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 22647–22657, 2024.
SubT-MRS Dataset: Pushing SLAM Towards All-weather Environments.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 22647–22657, 2024. -
 PyPose v0.6: The Imperative Programming Interface for Robotics.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023.
PyPose v0.6: The Imperative Programming Interface for Robotics.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023. -
Double-Iterative Gaussian Process Regression for Modeling Error Compensation in Autonomous Racing.22nd IFAC World Congress, vol. 56, no. 2, pp. 7940–7947, 2023.
-
Multirobot Fully Distributed Active Joint Localization and Target Tracking.IEEE Transactions on Control Systems Technology, 2023.
-
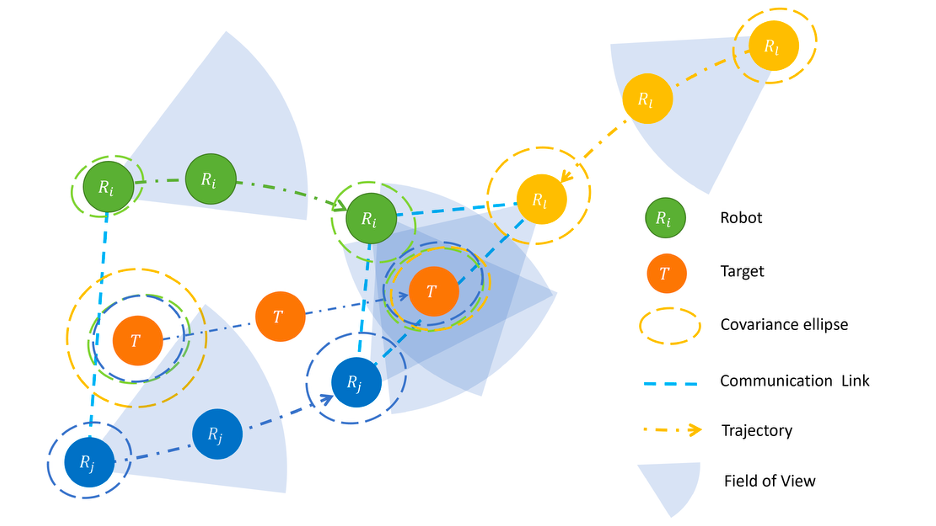 An optimization approach to fully distributed active joint localization and target tracking in multi-robot systems.2022 American Control Conference (ACC), pp. 5081–5086, 2022.
An optimization approach to fully distributed active joint localization and target tracking in multi-robot systems.2022 American Control Conference (ACC), pp. 5081–5086, 2022.