Low speed does not always guarantee safety in off-road driving. For instance, crossing a ditch may be risky at a low speed due to the risk of getting stuck, yet safe at a higher speed with a controlled, accelerated jump. Achieving such behavior requires path planning that explicitly models complex motion dynamics, whereas existing methods often neglect this aspect and plan solely based on positions or a fixed velocity.
To address this gap, we introduce Motion-aware Traversability (MAT) representation to explicitly model terrain cost conditioned on actual robot motion. Instead of assigning a single scalar score for traversability, MAT models each terrain region as a Gaussian function of velocity. During online planning, we decompose the terrain cost computation into two stages: (1) predict terrain-dependent Gaussian parameters from perception in a single forward pass, (2) efficiently update terrain costs for new velocities inferred from current dynamics by evaluating these functions without repeated inference. We develop a system that integrates MAT to enable agile off-road navigation and evaluate it in both simulated and real-world environments with various obstacles. Results show that MAT achieves real-time efficiency and enhances the performance of off-road navigation, reducing path detours by 75% while maintaining safety across challenging terrains.
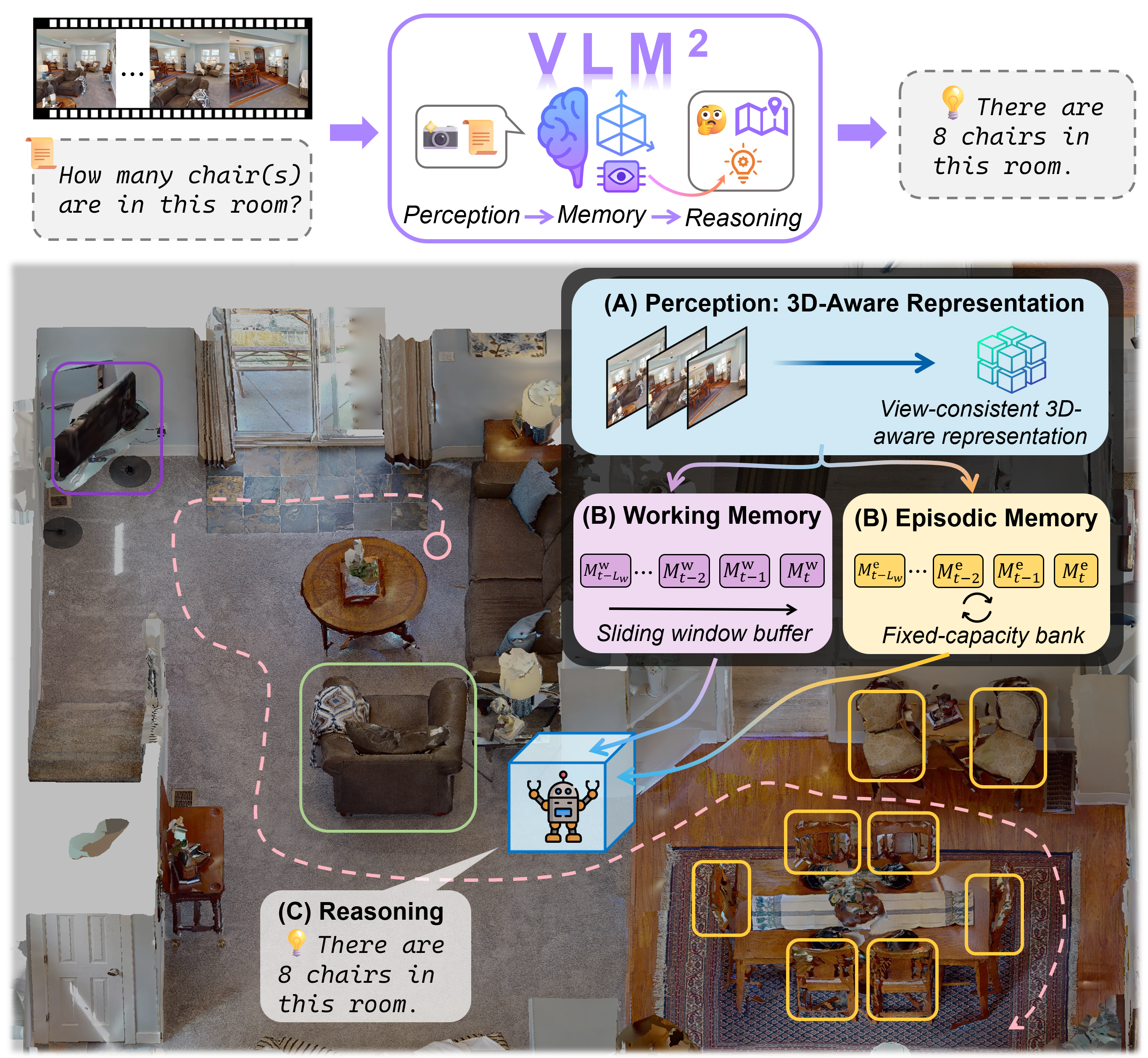
Method Overview

Given a local perception input (a LiDAR-based height map in practice), the neural network performs one-shot inference to generate the Motion-aware Traversability (MAT) map, where each cell encodes a Gaussian function of velocity. The local planner (e.g., MPPI) then samples trajectories based on vehicle dynamics, continuously querying the MAT map for terrain costs with position-velocity pairs to optimize motion in real time.
Demonstrations
Ditch Traversal: To Jump or to Detour?
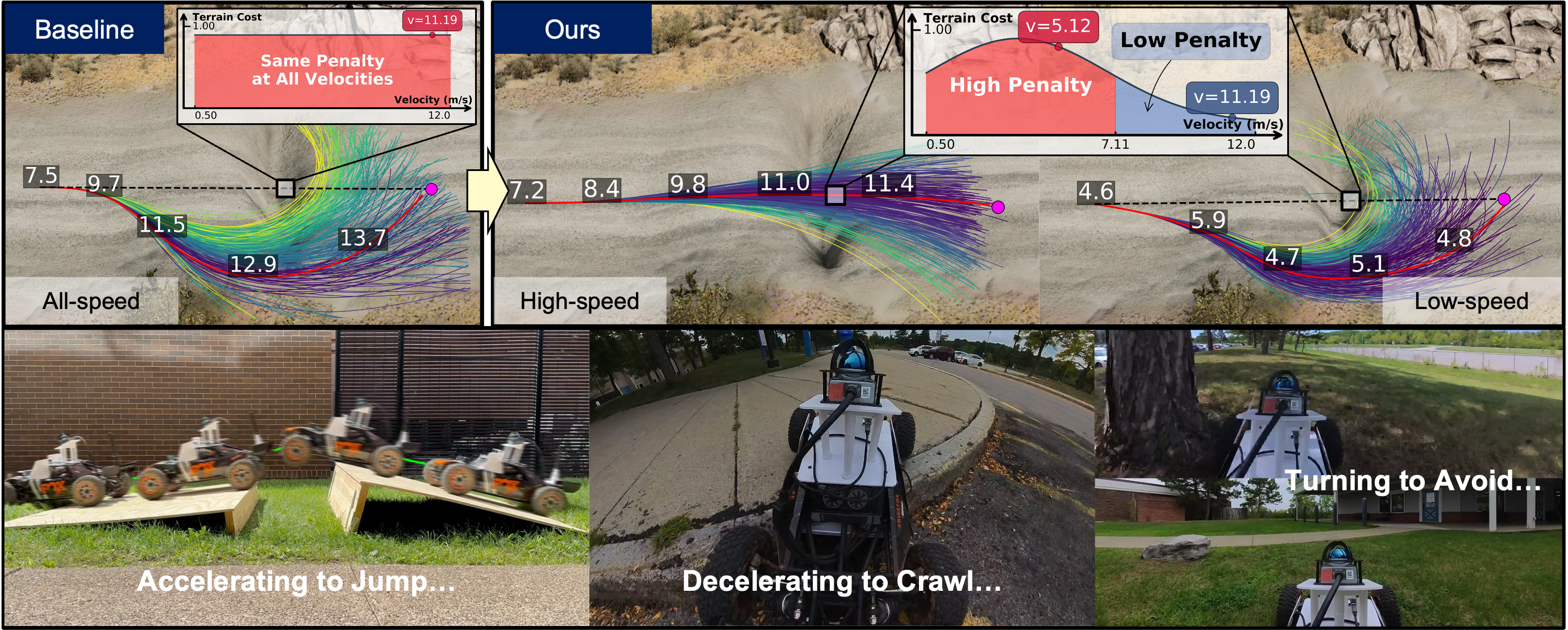
We deploy MAT on Racer, a car equipped with a MID-360 Livox, an NVIDIA Jetson Nano, and an Arduino. Consider the navigation task where a robot must reach a goal blocked by ditches. We compare MAT with a Baseline that uses standard position-only terrain costs.
- Manmade Ditch & Fence (Top): The Baseline consistently avoids both obstacles due to the high terrain cost, leading to substantial detours. MAT identifies that the ditch is traversable at high speed and accelerates to jump across it, while correctly recognizing the fence as untraversable at all velocities. When operating in low speed, MAT identifies that it cannot reach the velocity required for a safe jump and shifts its strategy to avoid the ditch.
- Natural Snow Ditch (Bottom): While the Baseline avoids the snow ditch entirely, MAT exploits momentum to traverse the ditch directly, significantly reducing travel time and distance.
How does MAT React to Other Outdoor Obstacles?
During outdoor navigation, the robot encounters varied other obstacles from rocks to curbs. The challenge is that not all obstacles should be treated the same: a rock is a permanent hazard, while a curb is only dangerous if hit at high speed.
Publications
-
Learning When to Jump for Off-road Navigation.arXiv preprint arXiv:2602.00877, 2026.