Video
Check a more detailed version here.
Method Overview
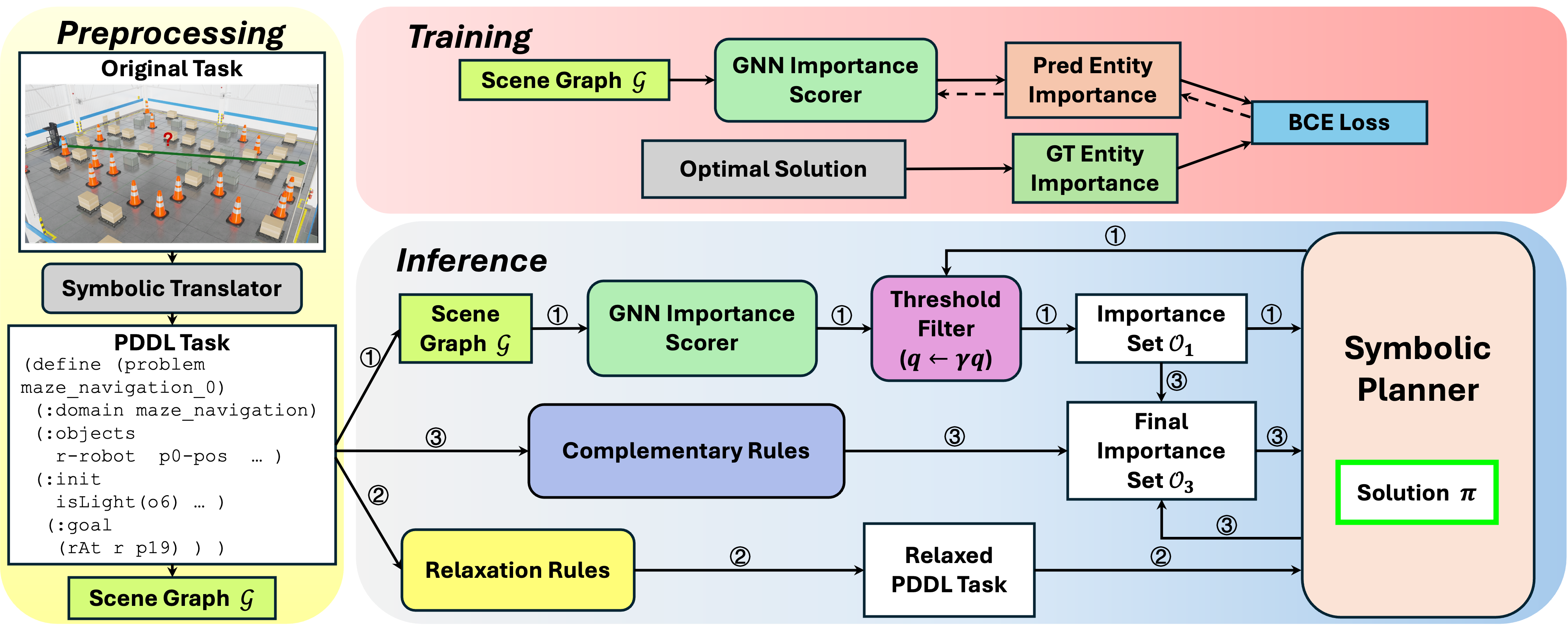
Flax is a neuro-symbolic relaxation framework designed for fast task planning. It combines neural importance prediction with symbolic rough-plan enhancement and complementary rule expansion.
Experiments
We propose a task called Maze Navigation Among Movable Obstacles (MazeNamo). In a simplified MiniGrid environment, the scenario consists of a grid-based layout with three types of objects: walls (grey blocks), heavy boxes (blue blocks), and light boxes (yellow blocks). The agent can execute basic navigation actions, including moving forward and turning left or right, as well as three additional manipulative actions: push, pick up, and drop down. The following constraints govern object interactions:
- Heavy boxes can only be pushed.
- Light boxes can be both pushed and picked up.
- Light boxes can be dropped either on the floor or on heavy boxes but cannot be placed on other light boxes.
- At any given time, the agent can interact with only one box.
We compare Flax with two baselines which both struggle in complex, long-horizon tasks with large search spaces. For example, on a 15x15 maze, pure symbolic planning (Fast Downward in LAMA-first mode) can spend several minutes expanding useless nodes. PLOI prunes the search space by gradually filtering out important objects, but it sometimes ignores critical objects and gets stuck on an unsolvable simplified task. In contrast, when applying our Flax, a correction mechanism ensures the solvability of the simplified task. As we can see in the video, an important object is recovered. This correction mechanism promptly detects and corrects pruning errors, preventing unnecessary overhead.
We also evaluate Flax on a forklift platform within the Isaac Sim environment.
We deployed Flax on Nova, a Unitree Go2 quadruped robot equipped with a Livox Mid-360 LiDAR, a 6-DoF D1 manipulator, and an Intel RealSense D455 camera mounted near the gripper.
Publication
-
Fast Task Planning with Neuro-Symbolic Relaxation.IEEE Robotics and Automation Letters (RA-L), vol. 11, no. 3, pp. 3684–3691, 2026.

